










BeingBeyond Officially Launches U1, the World’s First Real DexUMI, Bringing UMI into the Dexterous-Hand Era

Date:2026.03.23

Views: 1602
As embodied intelligence accelerates toward real-world deployment, data acquisition methods are becoming a critical layer of infrastructure that determines the ceiling of model capability. Until now, neither capital-intensive teleoperation with real robots nor lightweight approaches based on human video or simulation data have been able to simultaneously satisfy the need for large-scale, high-quality, and low-cost data collection.

Over the past year, UMI (Universal Manipulation Interface) has shown the industry the tremendous potential of scalable, low-cost data collection in real-world environments without relying on a full robot body. At the same time, however, most existing solutions remain centered on grippers, making it difficult to meet the demands of more advanced dexterous manipulation in fine contact, multi-finger coordination, natural interaction, and tactile sensing. The field urgently needs a revolutionary solution for dexterous-hand data collection.
Against this backdrop, BeingBeyond officially launches U1, the world’s first Real DexUMI. For the first time, U1 unifies dexterous-hand data collection and robotic end-effector functionality within a single system. Built around the principle of consistency between the operator-side interface and the robotic end effector, it introduces a higher-quality and more scalable data paradigm for dexterous manipulation.
By integrating dexterous-hand hardware, operator-side interaction interfaces, dynamic tracking, and tactile sensing into one system, BeingBeyond U1 provides a more complete engineering pathway for dexterous manipulation data collection and deployment, connecting the full pipeline from data collection to transfer, deployment, and execution. It brings the UMI paradigm from the gripper era into the dexterous-hand era, redefining the foundational form of dexterous manipulation infrastructure.
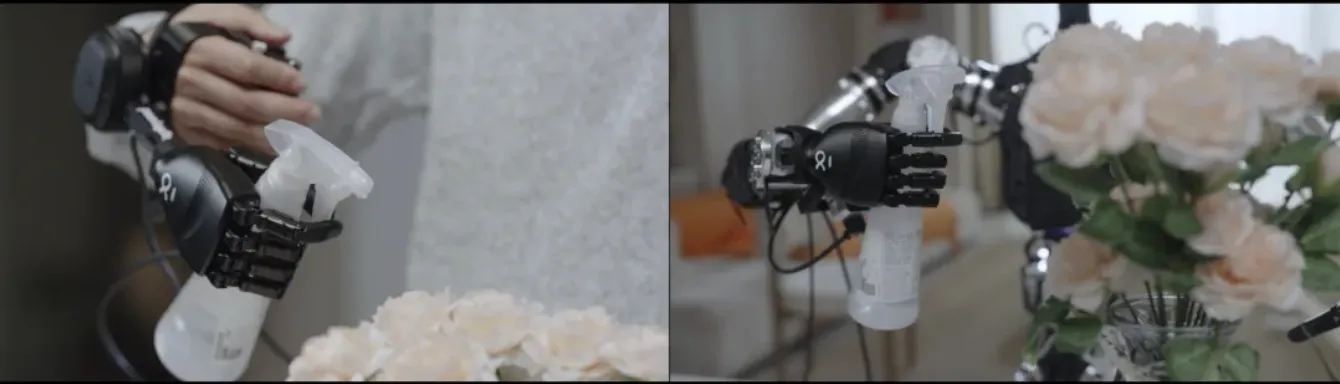
One of the core innovations of BeingBeyond U1 is its glove-free palm teleoperation interface. Unlike conventional glove-based solutions that require full wearing, adjustment, and calibration, this design eliminates complicated setup. Users simply place it in the palm of the hand to perform precise teleoperation. This significantly lowers the barrier to use, makes data collection closer to natural human manipulation, and delivers higher efficiency and a better user experience in long-duration data collection, rapid operator switching, and real-world deployment.

BeingBeyond U1 can perform precise operations such as using tools to drive screws.
In terms of performance, BeingBeyond U1 provides strong system-level support for the precision and stability required by real-world dexterous manipulation. System tests show that U1 achieves a maximum dynamic tracking error of less than 1 mm and an average error of less than 0.1 mm. This means the system is capable not only of highly accurate static recording, but also of maintaining stable and reliable data capture during real manipulation, providing a solid foundation for downstream model training, motion replay, and high-precision task execution.

BeingBeyond U1 achieves precise dexterous control with minimal setup
As an end effector, BeingBeyond U1 weighs 680 g and features an 11-joint design, including 6 active joints and 5 passive joints. This balances dexterity, compliance, and structural strength, enabling more complex grasping, contact-rich interaction, and in-hand manipulation. At the same time, U1 supports a payload of 5 kg, further expanding the role of dexterous hands in industrial applications and complex real-world scenarios. Compared with systems designed primarily for lightweight demos, BeingBeyond U1 emphasizes a complete closed-loop capability: data can be collected, used for training, transferred, deployed, and executed in real tasks.
BeingBeyond U1: Bringing UMI into the Dexterous-Hand Era
From an industry perspective, the significance of BeingBeyond U1 lies not only in the launch of a new dexterous-hand data collection system, but also in the way it answers a critical question: as UMI evolves from grippers to dexterous hands, what should the ideal system look like?
 BeingBeyond U1 offers a clear answer. It must combine low-barrier interaction, natural operation, high-precision dynamic tracking, dexterous execution, and tactile sensing, while truly bridging the gap between data collection and deployment. In doing so, it addresses long-standing pain points in the field and points toward a new direction for dexterous manipulation data infrastructure.
BeingBeyond U1 offers a clear answer. It must combine low-barrier interaction, natural operation, high-precision dynamic tracking, dexterous execution, and tactile sensing, while truly bridging the gap between data collection and deployment. In doing so, it addresses long-standing pain points in the field and points toward a new direction for dexterous manipulation data infrastructure.
BeingBeyond U1 will establish a brand-new data paradigm for dexterous manipulation
As embodied intelligence in real-world environments increasingly enters a stage of competition centered on data infrastructure, BeingBeyond U1 aims to advance not just a product, but a new paradigm for dexterous manipulation data. High-quality dexterous data should no longer depend on cumbersome wearable systems or complex teleoperation setups. Dexterous hands should no longer be limited to demo-oriented showcases, but instead become scalable, continuously trainable, and deployment-ready infrastructure for real-world tasks.








京公网安备11010802047405号