Embody the Future
Leveraging large-scale human data to build general-purpose foundational models for robots


Embody the Future

Being-VL
The Being-VL series is the next-generation multimodal foundation model for robotics. Based on multimodal perception of the physical world, Being-VL unifies 3D spatial understanding and human language intent, integrating perception, cognition, reasoning and planning to provide a powerful intelligence foundation for autonomous navigation, language interaction, and reliable task execution in real-world robotics applications.
Learn More

Being-H
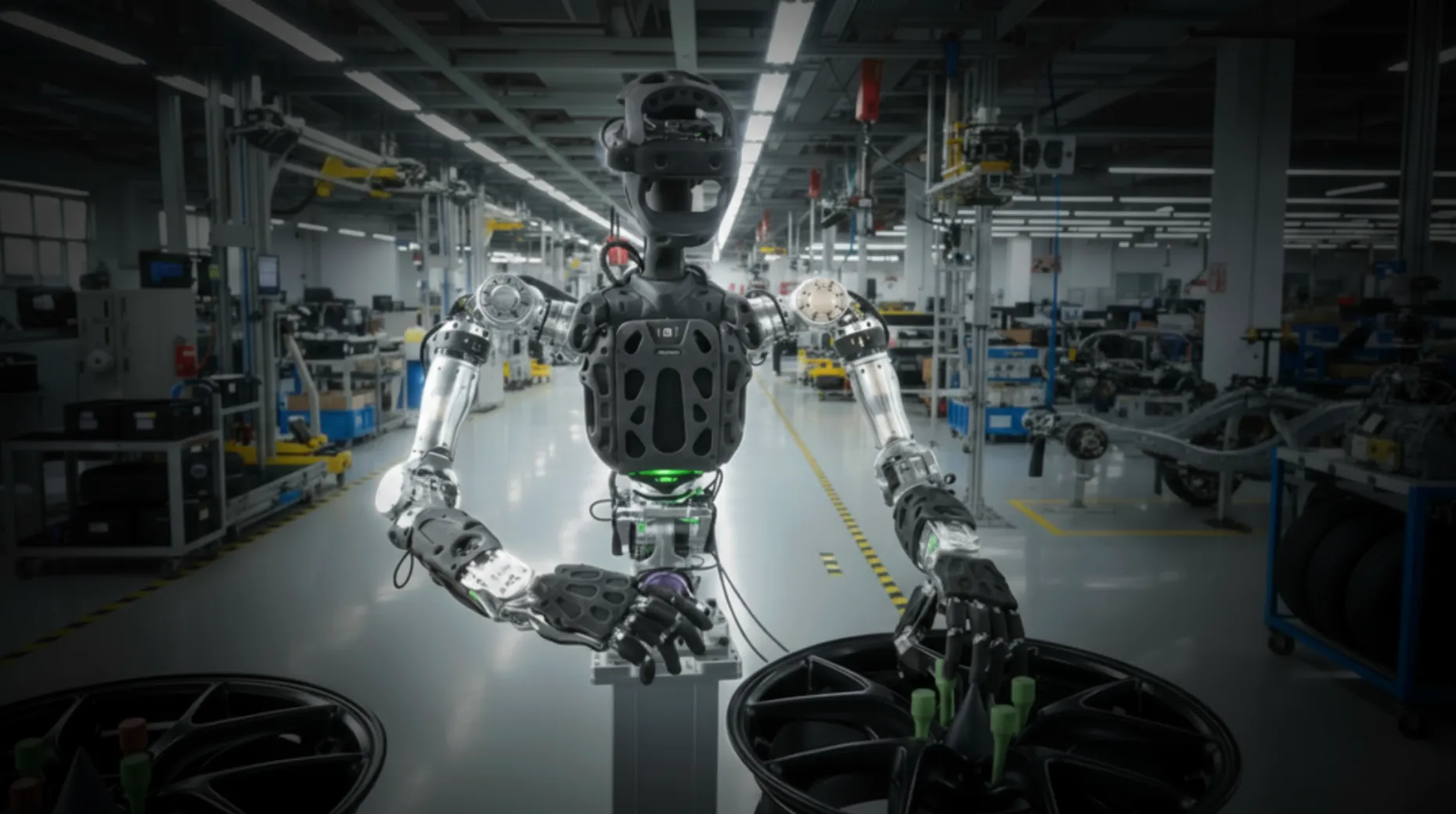
The Being-H series is a hand motion generation model focused on dexterous manipulation. Pretrained on massive human manipulation videos to learn everyday human hand actions, Being-H enables robotic dexterous hands to quickly master new tasks with minimal real robot data—handling everything from fine assembly to flexible object arrangement, tool use, and complex interactions, making robot manipulation more dexterous, robust, and generalizable.
Learn More
Being-M
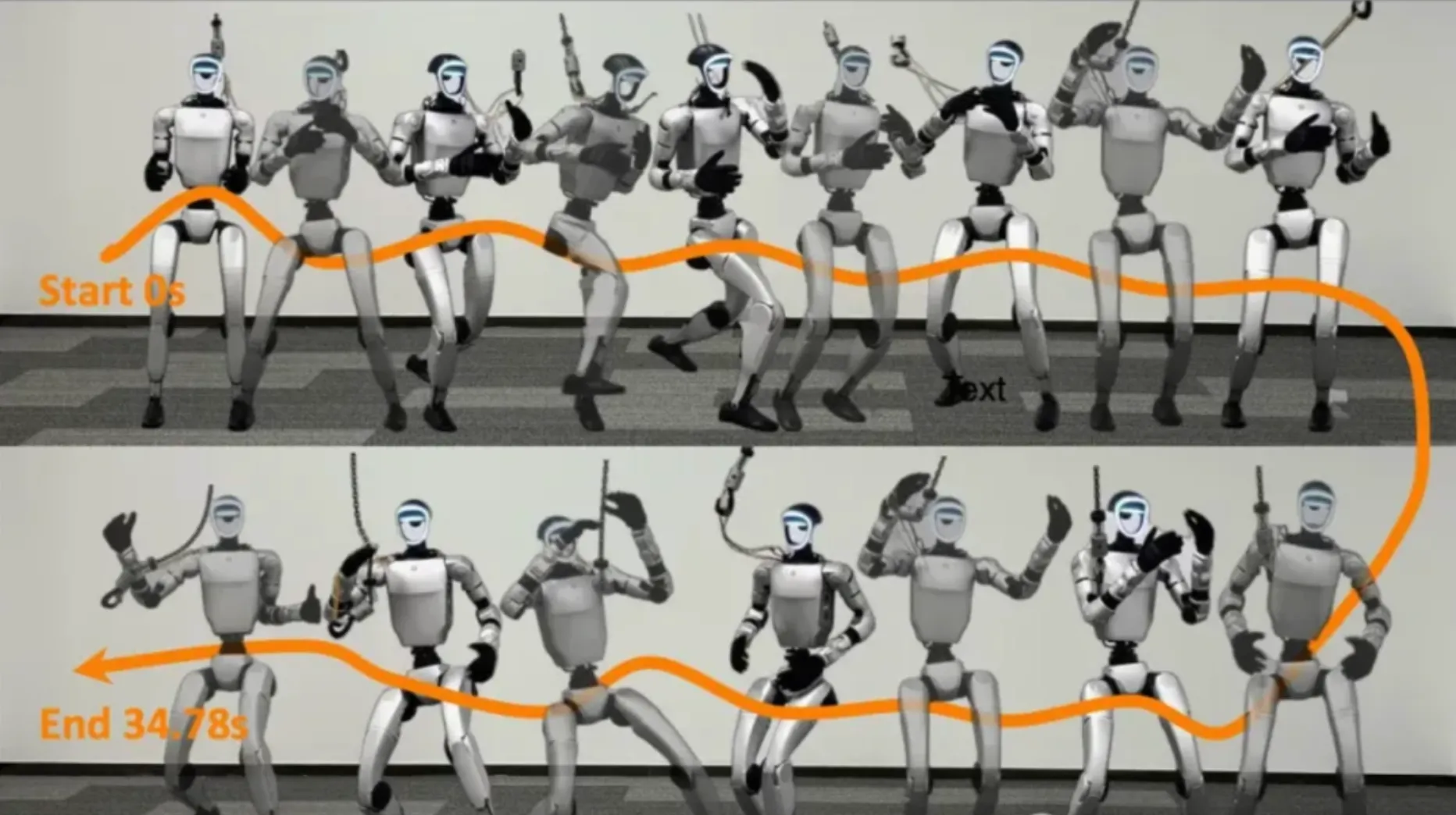
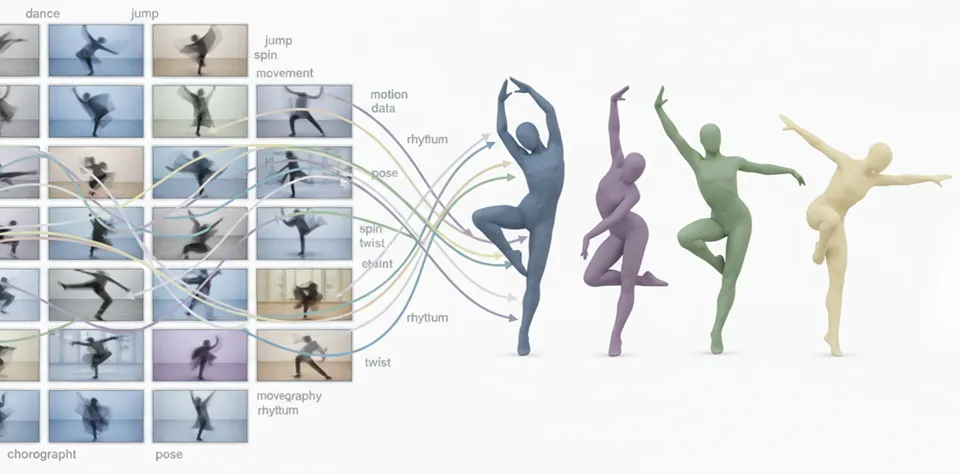
The Being-M series whole-body motion generation model learns general human behavioral patterns from large-scale human videos, serving as a bridge between the robot brain and body. It can generate physically plausible, precise, and coherent full-body motion sequences (including hand actions) based on high-level task instructions. Being-M generalizes across embodiments and is a key model for achieving autonomous humanoid robots.
Learn More

Being-W
The Being-W series is a low-level whole-body control model for robotic systems designed to handle the complex dynamics of humanoid robots. Trained with reinforcement learning on massive human data, it faithfully follows upstream full-body motion commands with stable zero-shot execution, fundamentally addressing the core challenge of controlling humanoid robots.
Learn More


Core Technological Advantages

Large-Scale, Low-Cost Data
Human data from the real physical world, large in scale and easy to obtain, enables more effective model training at lower cost.

Cross-Embodiment Generalization
Models pre-trained on human data can naturally be compatible with various end effectors and humanoid robots, achieving cross-embodiment generalization.

Strong Real-World Adaptability
Humanoid robots equipped with pre-trained models using human data can directly substitute human labor, fully matching the real-world scenarios of human work.

About Us
We are an innovative company focused on artificial intelligence research and development, dedicated to solving core embodied intelligence challenges and leading the humanoid robotics technology revolution.

Mission
Mission

Values
Values
Explore, Innovate, Grow Together

Vision
Vision











京公网安备11010802047405号